Tesseract Inc.
YOUR PROJECT OUR SOLUTIONS
Onboard Processor: CubeComputer
The processor and board is one of the most important components of the satellite. For the current mission, the CubeComputer board will be used as its central processing unit. It is a general-purpose onboard computer intended for use on small satellites. It was designed to withstand cosmic radiation as well as extreme temperature variations. The board is built around an ARM Cortex-M3based MCU, which delivers high performance at very low power. To protect the OBC against radiation effects such as SEUs and SELs, fault tolerant techniques have also been implemented.
In addition there will be 100 GB of external flash memory for storage as well as an upgrade to 2 MB of internal volatile RAM memory.
The CubeComputer will coordinate all actions in regards to communications, orbital corrections, power managements, and imaging. The embedded system will run several tasks simultaneously to manage and monitor each of the above functionalities. It will monitor the supply voltage, current (reactive to lactchups), on-board temperature sensor feedback, and the 8x12-bit onboard A/D converters hooked on to various sensors. The bootloader will have the ability to store and load multiple programs in-flight to ensure recovery in case of error or SW/HW exceptions.
The CubeComputer will be set up to take images at certain time intervals and store them on its flash drive in a FIFO manner. Once the images have been sent to a base-station, the memory used will be freed for new data.

Operating Voltage: 3.3 V
Power Consumption: < 200 mW
Speed: 120 MHz
Register/Bus Size: 32-bit
RAM: 2 MB
External NVRAM: 100 GB
Code Storage: 4MB of Internal Flash for Code Storage
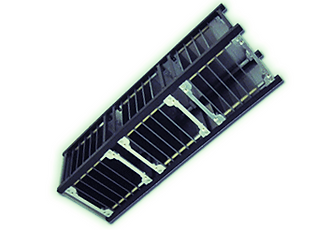
Structure
The aluminum cube structure will have a rectangle dimensions with cubic top/bottom. The top of the satellite, always facing away from earth (and toward the sun), will consist of 13 solar panels. The deployable solar panels/arrays will be spring-loaded to deploy from the top in a "dart" configuration. The bottom panel, will have the camera aperture. The total mass is expected to be around 8 kg fully loaded. The structure is a 4U structure (3U shown) that is composed of one 3U and one 1U structures, making the satellite 4U long.
Outside Size Inside Size Price
100 x 100 x 460.75 98.4 x 98.4 x 393.6 $5,800.00

Power: Solar Panels
The satellite power will be provided by 13 triple junction gallium-arsenide (GaAs) solar cells using a direct energy transfer (DET) method. During peak usage periods and eclipse conditions, the cubesat will use about 3 Ahr Lithium-Ion battery connected to an unregulated satellite power bus operating nominally between 3 and 5V. The total power provided will be between 1- 11.5 W depending on orientation and orbit.
Solar Panels: 13 panels (3 on each wing and then 1 in the middle) 13 panels X 2.3 W = 29.9 W
Power Supply: Limits power output to 30 W, which is maxed out by 13 panels

Power System
The NanoPower P-series power supplies are designed for small, low-cost satellites with power demands from 1-30W. Employing a strictly KISS design philosophy, the NanoPower interfaces to triple junction photo-voltaic cells and uses a highly effecient boost-converter to condition their output power in order to charge the provided lithium-ion batteries. The incoming power along with the energy stored in the batteries is used to feed two buck-converters supplying a 3.3V@5A and a 5V@4A output bus. Each of these busses have three individually output switches with over-current shut-down and latch-up protection.
Speficications
Output power: up to 30W
Two regulated power buses: 3.3V@5A and 5V@4A
Output: 2600mAh lithium ion battery pack

Communications System
The transmitter we used is “Highly Integrated S-Band Transmitter for Pico and Nano Satellite” and the receiver we used is “S-Band Receiver for HISPICO”

The transmitter and receiver enable our CubeSat to have a full duplex system with telemetry, telecommand & beacon capabilities on a single board. It uses S band (2.2 GHz – 2.3 GHz) to transmit and receive data. The data rate of both transmitter and receiver is about 1 Mbps. Besides, the data rate of the ground station is about 6 Mbps. Therefore, the ground station can receive the data transmitted by the cubesat.
Detailed specifications are summirized below:

Attitude Determination and Control
The CubeSat’s attitude is approximately determined using the magnetic field vector from the onboard magnetometers. The CubeSat’s attitude will be controlled by a B-dot controller, comprised of 3 aircore coil magnetorquers, and reaction wheels.
This will enable the CubeSat to point in the right direction as needed. It is important to take into account the volume of the CubeSat, in order to determine that the necessary parts fit in the space available. For these reasons, we need to take into account the measurements of the components very precisely . Power can also play a factor in this, since we cannot exceed certain power considerations that are available for use in the CubeSat.
The image below shows the CubeSat's attitude control system:

Something we considered for this attitude control system is a magnetorquer board. The specifications are described in the table below. This system not only provides flexibility for placing the actuator and magnetometers, but it can also be controlled both through digital or analog interfaces. This system already contains three axis actuators, three magnetometers, and even two torque rods, and one air core torquer. This gives us all the essentials needed to precisely control our CubeSat and meet our needs. This attitude control system is suitable up to 12 U CubeSat system, and up to 24kg, which is above and beyond our specifications.

The CubeSat will utilize the MAI-100 ADACS attitude and control system. This is a better alternative and serves our satellite's purpose better. This attitude and control system is specifically designed for more precise operations like Earth imaging. Also, the whole system is very conveniently enclosed into a 4”X4”X3.1” box. This attitude and control system does come at a higher cost of around $36,000, but we believe that the benefits that it provides will bring great value to our system.
The table below summaries the specifications:

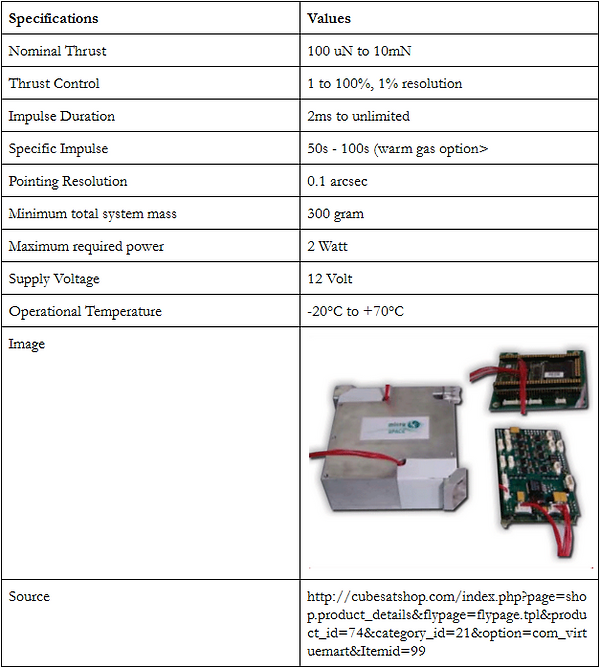
Mini-Propulsion System
The cubesat's propulsion system will use a liquid-fuelled cold gas system using nitrogen, as a propellant. The nozzle will be oriented such that thrusting will induce a major-axis spin on the cubesat. The satellite angular orientation will be measured using the on-board attitude determination subsystem as mentioned in the previous heading. For our CubeSat, a 1.7nl N2 Cool Gas Generator will be used. This supplies up to 2.1 grams of nitrogen gas.
The following table describes the specifications of the cool gas-generator chosen.

The micropropulsion system used for the CubeSat can be used in satellite ranging from 1 kg up to an incredible 100 kg and offers three axis stabilization. The specific characteritics of the system are shown in the table below: